.png?table=collection&id=cbe6506e-1263-8358-a4d7-07ce62fcbb3f&t=cbe6506e-1263-8358-a4d7-07ce62fcbb3f)
AI智能体掘金:代码如何驱动Claude与机器人
type
status
date
slug
summary
tags
category
icon
password
网址
在人工智能飞速发展的浪潮中,我们见证了大型语言模型(LLM)在理解和生成文本方面的惊人能力。然而,当AI的目标从“生成下一个词”转变为“完成一个长期、复杂的任务”时,一个关键的问题浮现:是什么让AI能够像一个真正的“智能体”一样,在现实世界或数字环境中稳定、可靠地执行任务?最近,来自UIUC、Meta和Stanford的三位顶尖研究者发布了一篇里程碑式的综述,为我们揭示了Claude Code、AI编程助手乃至机器人背后的通用运行逻辑——代码化的执行过程。
这篇长达102页的综述,并非简单介绍Agent框架的架构,而是深入探讨了当智能体被置于长期任务环境中时,驱动其推理、行动、反馈和验证的“操作对象”是什么。他们的答案振聋发聩:是代码。这里的“代码”并非指Agent框架本身,而是指智能体在执行任务过程中不断生成、运行、修改、保存和共享的中间产物,如Claude Code生成的Plan.md、Skills.md,或是用于验证的Python脚本。
“脚手架”:赋能AI智能体的软件基础设施
在深入理解代码的作用之前,我们首先需要明确“智能体脚手架(Agent Harness)”的概念。一个纯粹的大语言模型本质上是无状态的,仅擅长预测序列。要让它成为能够执行长期任务的“智能体”,必须在模型外围构建一层复杂的软件基础设施。这层基础设施,即Agent Harness,包含:
- 工具与API接口:连接模型与外部世界的能力。
- 安全的沙盒执行环境:隔离模型操作,防止意外影响。
- 记忆与上下文管理系统:处理信息,保持任务连贯性。
- 验证器与权限边界:确保操作的正确性和安全性。
- 执行与反馈的控制循环:建立规划、执行、验证的闭环。
这套“脚手架”系统,是连接LLM“大脑”与“行动”的关键桥梁。
代码:智能体脚手架的核心媒介
研究者指出,代码之所以成为理想的脚手架媒介,在于其具备自然语言所不具备的三大核心特质:
- 可执行性(Executable):代码可以直接被计算机执行,产生明确、客观的结果,而非模棱两可的文本。
- 可检查性(Inspectable):代码的执行过程会产生详细的日志、堆栈信息和错误报告,便于精确追踪和分析。
- 状态化(Stateful):代码运行的环境(如文件系统、数据库)可以持久化保存任务的进度和状态。
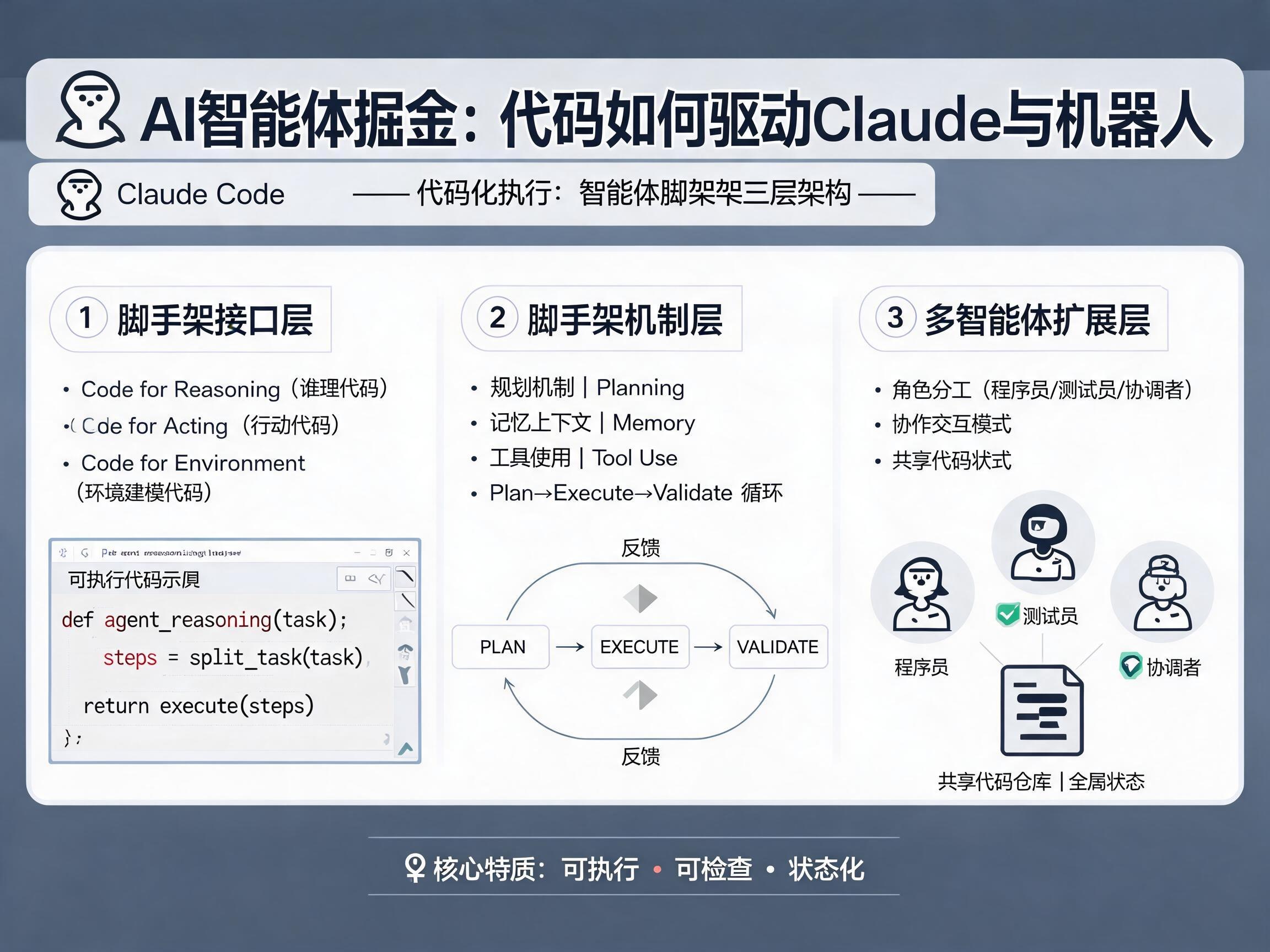
基于这三大特质,综述构建了一个三层架构来系统性地拆解代码在智能体中的作用:
第一层:脚手架接口层——代码作为沟通桥梁
在接口层,代码充当了智能体与现实世界沟通的基础。它体现在三个核心方面:
- 用于推理的代码(Code for Reasoning):将复杂的逻辑推理转化为可执行的代码,例如生成Python脚本进行精确计算,或利用Lean等形式化语言进行逻辑验证。这种方式将高层逻辑分解与底层精确计算分离,并通过“生成代码 -> 运行 -> 反馈 -> 修正”的闭环迭代优化推理。
- 用于行动的代码(Code for Acting):当智能体需要与物理(机器人)或数字(软件GUI)世界交互时,代码成为其执行载体。这包括调用预先编写的、符合物理规律的代码技能库(如SayCan),生成包含条件分支和循环的控制脚本,甚至在长期运行中将成功操作封装成新函数,构建持续进化的“技能库”(如Voyager系统)。
- 用于环境建模的代码(Code for Environment):代码能够将复杂、动态的环境具象化为可操作的对象。例如,使用类和对象来刻画环境结构,通过阅读代码运行日志来推断环境变化,或利用单元测试构建具备客观评判标准的微型世界。
第二层:脚手架机制层——保障长期任务的可靠性
为了让智能体在数小时甚至数天的任务中不崩溃,需要一套复杂的机制。这层机制覆盖了智能体运作的核心环节:
- 规划机制(Planning):将复杂任务分解为清晰的执行路径。这包括线性的步骤分解(如生成PLAN.md)、基于代码仓库依赖图谱的结构化规划、利用蒙特卡洛树搜索(MCTS)探索多条路径,以及通过编排理解、检索、编码、测试等流水线阶段进行任务调度。
- 记忆与上下文工程(Memory and Context Engineering):面对海量代码库,LLM容易受上下文长度限制。此层通过严格管理工作记忆、利用RAG进行语义记忆检索、构建经验与长期记忆库,以及对过长日志进行压缩或卸载,来在有限上下文中保留关键信息。
- 工具使用(Tool Use):智能体改变外部世界的手段。在此层,工具的使用必须受到严格管控,包括功能导向工具(如API调用)、环境交互工具(如Shell命令)、验证驱动工具(如Linter、测试框架)以及负责调度和异常恢复的工作流编排工具。
- 计划-执行-验证(PEV)循环:将Agent的调试过程框架化为可重复的状态转换流程。每次修改都在沙盒环境中执行,并通过静态/动态分析进行验证,确保操作的可观测性、判断性和必要时的回滚。
- 自适应脚手架工程(Agentic Harness Engineering):一个前沿概念,指系统能够自动优化自身的脚手架,包括提示词、检索策略、工具描述等。这通过深度遥测(全面记录执行轨迹)和进化智能体(分析数据并自动修改系统配置)来实现,目标是让整个系统越来越稳定。
第三层:多智能体扩展层——代码作为协作基底
面对真实的、复杂的企业级需求,单智能体的能力瓶颈需要通过多智能体协同(MAS)来缓解。在此阶段,代码正式成为各个智能体之间沟通、协同与达成共识的“共享基底”。
- 角色分工(Role Specialization):系统模仿人类团队,拆分出程序员、测试员、审查员、执行者、规划经理等高度专业化的角色。
- 交互模式(Interaction Modes):支持结对编程、审查与修复、对抗性验证(如模糊测试)、推理辩论等多种协作模式。
- 共享的程序状态(Shared Program State):研究者强调,多智能体系统必须建立基于代码的客观全局共享状态,而非仅依赖“聊天记录”。“共识”应体现在测试全量通过、静态检查无警告、性能指标达标等客观结果上。
五大前沿应用领域与未来挑战
“代码作为智能体脚手架”的理念已在多个领域落地生根:
- AI编程助手:从代码补全到自主处理GitHub Issue,如SWE-agent。
- GUI/操作系统智能体:通过代码操控UI界面,如Playwright脚本。
- 科学发现:将科研流程整合为代码流水线,控制机器人进行实验。
- 个性化推荐引擎:根据用户实时反馈自动编写和修改策略代码。
- 具身智能体:将抽象行动意图转化为带有运动学参数的可执行控制代码,确保机器人动作符合物理定律。
尽管前景光明,该领域仍面临挑战:评测指标的瓶颈(仅关注最终成功率,忽略代码质量)、不完整的执行反馈(难以检测安全漏洞和性能隐患)、无倒退的自我进化(易引入新Bug)、多智能体语义冲突(文本合并工具无法解决深层逻辑断裂)以及安全问责与人类监督(高危操作需绝对否决权)。
结语
这篇综述为AI智能体系统工程提供了一张清晰的蓝图。要让AI真正走向复杂的真实世界,仅仅依靠大模型算力提升是不足够的。必须将代码作为系统的骨架、神经和肌肉。大模型提供“大脑”,而基于代码构建的Agent Harness则赋予这颗大脑以稳固的沙盒、真实的反馈、可靠的记忆和高效的组织法则。只有深深植根于这套“可执行、可检查、状态化”的代码基底之上,AI智能体才能从演示级的玩具,蜕变为工业级的可靠生产力。
Loading...